Conventional Differentiation from the Michelson-Morley experiment:
Vector Averages.
Michelson-Morley experiment and circular
motion.
This page has the modest intention of using conventional differential
calculus (as a contrast to my innovation of geometric mean differentiation) in
relation to the Minkowski Interval, in the context of the Michelson-Morley
experimental set-up.
The following argument
relates the Michelson-Morley experimental set-up to considerations of circular
motion. Tho intended to test for a universal ether medium of light waves, this
experiment essentially tests whether earth velocity makes any difference to the
speed of light. This is done by reflecting a light beam in line with earth
motion, at the same time splitting the beam at source, so that part of it is
reflected at right angles, for the same distance.
The experimenters
calculated that the times taken by the two light beams would be different. The
physics community was thrown into confusion by the fact that experiment showed
the light beams took the same time. But, as I've said on several pages
previously, that was because of a simple calculating mistake, or over-sight, in
using the arithmetic mean to average the times taken by the reflected
beams.
The geometric mean
correctly gives the same time taken by the light beams. That is because
reflecting the beam with respect to earth motion causes a relative change in
velocity, or, in other words, relative acceleration of the light beam parallel
to earth motion. (A theory of relativity waited upon Einstein in 1905.) And the
geometric mean is the average to use for non-uniform velocity, while the
arithmetic mean only serves for averaging constant velocity.
The beam perpendicular
to earth motion is also reflected but the reflection makes no difference to the
speed of this beam with respect to earth motion. Motion, considered as a
vector, includes not only its magnitude or greatness but also its
direction.
Altho there is no
change in the relative speed of the cross-ways beam, with respect to earth
motion, there is a change in relative direction. And this implies acceleration,
for which the geometric mean remains an appropriate average to take.
It so happens that the Minkowski Interval has a geometric mean form, which can
express the Michelson-Morley calculation, if corrected in terms of geometric
means.
Like the
Michelson-Morley experiment, circular motion is considered in terms of two
perpendicular components of acceleration. These are tangential (or centrifugal)
acceleration and normal (or centripetal) acceleration.
Tangential acceleration is angular acceleration multiplied by the radius.
Even when there is no angular acceleration, so that the circular motion is
uniform, there is still normal acceleration from the change in direction of its
velocity.
The Michelson-Morley experiment has some bearing on circular motion.
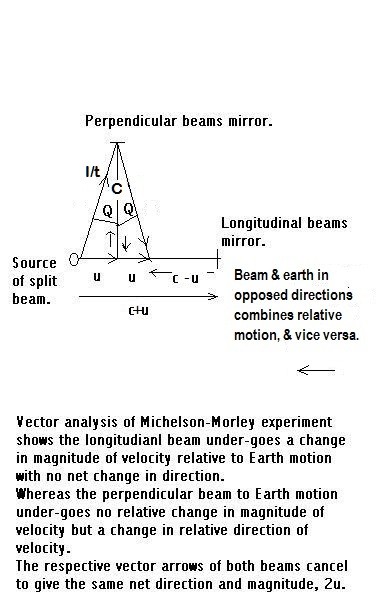
The light beam (speed,
c), reflected in line with earth motion (speed, u), gains speed from a
tail-wind boost and loses speed from a head-wind. That is, respectively: (c+u)
and (c-u).
Meanwhile, by the time
that the transverse beam has reached its reflecting mirror, the earth has moved
on (by velocity, u). And by the time it simultaneously meets its partner beam
again at the source, the earth has moved on again by an equal amount, u.
What this means is that
the cross-ways beam reflecting mirror is not quite perpendicular to the beam
source, considering that it has moved on with the earth, a tiny amount, during
the transit of the perpendicular beam from source to reflecting
mirror.
Likewise, there is an
equal angle (say, Q) made by the reflected cross-ways beam back to the source,
also moving with the earth.
This is pictured in the diagram on the previous web page: The Michelson-Morley null result as a
linear-angular momentum change conservation. It is shown again here for
convenience of reference.
The cross-ways beam reflecting mirror may be considered the origin of a
circle, to which the cross-ways beam is like a rotating radius.
With reference to the diagram, the split light beam travels from the source,
perpendicularly. However, the motion of the Earth (speed u) carries the
cross-ways light beam somewhat before it reaches its reflecting mirror. A
similar effect is repeated as the crossways light beam is reflected back to the
source.
By the way, the diagram very much exaggerates this crossways drift of the
light beam, because the motion is actually very slight compared to light-speed
and the angle of drift, angle Q, would not be noticeable. It is the genius of
the Michelson-Morley interferometer that is able to detect such small
effects.
This cross-ways light beam drift can be seen as a summation of three
vectors. By the time this light beam, drifting from perpendicular, has reached
its reflecting mirror, the Earth has moved on to a position where the source is
still perpendicular to the cross-ways reflecting mirror.
A vector is a magnitude and direction.
The first vector is the cross-ways light beam, of magnitude light-speed c, and
an arrow pointing from the source to its reflecting mirror.
The second vector is an arrow pointing from the reflecting mirror
perpendicularly to the source, that has moved, at the rate of Earth velocity u,
which is the third vector and summation vector of the first two vectors.
The third vector, of magnitude u, has the direction from the original source
position to the position of the source when the cross-ways beam reaches its
reflecting mirror.
Similar considerations apply for the journey of the reflected cross-ways
beam.
The second vector can be calculated by the Pythagoras theorem, where the
light beam velocity, c, is the hypotenuse:
The square of the second vector equals: c² - u². This happens to be the
square of the Minkowski Interval, I, divided by time, t, squared. Or:
(I/t) = (c² - u²)^1/2.
This formula comes into effect for velocities significant relative to light
speed. In this case, it is the velocity of a light beam cross-ways relative to
earth motion.
The same working applies for the reflected beam which is also moving
cross-ways, at the same rate, relative to earth motion.
Obviously, whatever average (such as arithmetic mean or geometric mean) one
took of the cross-ways relative velocity before and after reflection, because
they are the same, the average would also be the same.
Again with reference to the diagram, the light source is shown in three
positions: its original position, when it emits the perpendicularly split light
beam; its second position perpendicular to the cross-ways light beam about to
be reflected; and its third position when both beams have been reflected to
source, which the Michelson-Morley interferometer showed to be at the same
time.
The two source transitions are lines both given by Earth velocity u. In sum,
they are a line of magnitude 2u. This line makes a chord to a circle segment,
of radius light beam speed c, swept by the two angles, Q, or 2Q.
Merely differentiating the earth velocity, u, would be a classical or
non-relativistic differentiation. A relativistic differentiation requires
calculating in terms of a relativistic velocity. To calculate in terms of
relativistic velocity, the Earth velocity must be considered relative to the
light beam velocity. With respect to the earth-longitudinal light beam, this
involves the average velocity of the light beam reflected both ways in relation
to the direction of Earth motion.
In other words, relativistic velocity is another name for geometric mean
velocity. The theory of relativity is a theory of geometric means for
averages.
The light beam reflection changes its velocity relative to Earth motion,
Changing velocity (rather than constant velocity) implies it is unsuitable to
use the arithmetic mean used in the original calculation by Michelson and
Morley.
Instead, the geometric mean must be used. For the Earth-longitudinal light
beam, this gives the square root of the velocities with and against Earth
motion, respectively, (c+u) and (c-u). Hence geometric mean longitudinal
velocity is:
{(c+u)(c-u)}^1/2 = I/t. This is the Interval divided by time.
The same geometric mean velocity was obtained, above, using Pythagoras
theorem, for the cross-ways journey of the perpendicular light beam to the
longitudinal light beam.
Since the split light beams have the same average velocity (that is using
the geometric mean instead of the arithmetic mean) then they must take the same
time to return to source. And that correctly predicts the result of the
Michelson-Morley experiment.
Thus the relativistic equation of the Minkowski Interval is the geometric
mean distance. When divided by time, it is geometric mean velocity.
Relativity seems to mean averaging. In classical physics, the relativity
principle seems to involve the arithmetic mean. But in high-speed or high
energy physics, relativity seems to mean averaging by the geometric mean.
Conventional differentiation
of perpendicular relative velocities.
To top
The average velocity, the geometric mean, for the longitudinal journey is:
{(c+u)(c-u)}^1/2 = (c² - u²)^1/2 = cg = I/t.
The symbol, g = (1 - u²/c²)^1/2, has the form of the gamma factor,
originally called the Fitzgerald-Lorentz contraction factor. In the context of
the Michelson-Morley experiment, where the two observational times are the
same, it actually is the gamma factor. But in the Minkoski Interval, this isnt
generally the case: What I call "the Minkowski factor", g, is more general than
the gamma factor.
And (from my point of view) the gamma factor was essentially a correction
for the fact that the physics tradition, following Michelson and Morley, have
used the arithmetic mean, when (according to me) the geometric mean is required
to average the reflected journeys of the perpendicular light beams.
This contention of mine may be relevant to other interferometer experiments
that have descended from Michelson-Morley, whose names in technical achievement
are as legendary as Archimedes. For instance, there are modern laser
interferometers that attempt to detect gravity waves. In so far as they follow
the classical technique of averaging the time taken by reflected lasers, in
relation to, say, a gravity wave (instead of in relation to the earth) then I
guess this raises the same objection to use of the arithmetic mean, rather than
the geometric mean, to average relative acceleration of a reflected laser,
since the reflection would change the velocity of, or accelerate, the laser
light, in relation to the motion of earth or a gravity wave or whatever.
I know little physics and less maths but I'll attempt a run-thru of a
conventional treatment of the differential calculus of geometric mean velocity.
For convenience of notation, let cg = v, so that:
v = I/t.
The Interval is a constant, it is the common "space-time" measure that all
observers of a given event, arrive at from their differing local measures of
the events space and time co-ordinates.
The Michelson-Morley experiment deals in constant velocities, wheher of
light or the earth motion, and measures a constant time, shared by the return
journeys of the split light beams. Therefore, there would be no acceleration to
consider in these terms.
Departing from the classical Michelson-Morley experiment, the light beams
might have a carrier, other than Earth, whose velocity changes over time. Given
that variable, v is dependent on independent variable, t, it should be possible
to differentiate.
By rule, the derivative, of v, is:
dv/dt = -I/t².
The differentiation from first principles is given here (as distinct from my
new differentiation of a geometric mean derivative, given elsewhere).
Instead of the Greek letter delta, I use the hash sign to stand for a (usually
small) change in the variable:
v + #v = I/(t + #t)
#v = I/(t + #t) - I/t
= I{t - (t + #t)}/t(t + #t)
= -#t.I/t(t + #t).
Thus:
#v/#t = -I/t(t + #t).
Let #t approach a limit of zero. And express the resulting differentiation
by replacing the hash sign of a change-variable, #, with symbol, d:
dv/dt = -I/t² = -v/t = a.
This derivative has the dimensions of (a change in a change of) distance per
time squared; or a change in velocity over time, or, acceleration, a.
Coming to the cross-ways velocity, it is of the same magnitude, v, as the
longitudinal velocity but it is not simply taking place along a line, but at
two angles, Q, over a plane. This circular motion might be calculated from
trigonometry. Let Q = wt, where w means angular velocity. Thus (from the
diagram):
v = I/t = c.cosQ = c.cos wt.
By standard rule of trigonometric differentiation, its derivative is: dv/dt
= -cw sin wt.
From the diagram,
sin wt = sin Q = u/c.
Therefore: dv/dt = -cwu/c = -wu.
However, some care is needed here to determine whether the two derivatives,
of v with respect to t, are actually the same:
-v/t = -wu, only if w = v/x = cg/ut.
If velocity equals angular velocity times radius, v = wr, then apparently
radius, r = ct. From the diagram, marked in velocity terms, the radius appears
as light speed, c. Radius, as a distance dimension, is estimated by multiplying
velocity (in this case, c, the lengths of both lines to the angle 2Q, in the
diagram) by time, t. Hence, radius, r = ct.
Then w = v/r = cg/ct = g/t.
Therefore, the cross-ways and longitudinal derivatives agree, only if
u=c.
Or take: -cw sin wt = -v/t = -wr/t = -wct/t.
In that case, therefore, the two versions of dv/dt are only equal when: sin
wt = 1. The sine of an angle is only equal to one, at angle Q = π/2 or
ninety degrees, and every full turn of 2π or 360 degrees thereafter. This
would be when, in the diagram, u = c. This is consistent with sin Q = u/c.
Moreover, if u = c, then the third side of the triangle, I/t =
{(c²-u²)^1/2}t/t = 0.
This seems to be an occasion in which it is useful to think of Special
Relativity in terms of averages. The reflected cross-ways light beam is still,
on a plane, in two dimensions, and the reflected longitudinal light beam is
still on a line, in one dimension. But for each of them, on average, their
geometric mean, that is the Interval, is zero.
Vector Averages: the geometric mean
vector.
To top
The perpendicular beams should have a resultant vector acceleration, of a
direction in between the two, and of magnitude given by Pythagoras theorem.
Let the resultant vector acceleration be A, for:
A = {(-I/t²)² + (-wu)²}^1/2
= {(c² - u²)/t² + u²w²)}^1/2.
Therefore:
A = [{(c² - u²)/t² + (ug/t)²}^1/2]
= [{(c² - u²) + u²(c² - u²)/c²}^1/2]/t
= [{(c² - u²)[1 + u²/c²]}^1/2]/t
= [{(1 - u²/c²)[1 - (iu²)/c²]}^1/2]c/t
The vector acceleration is light velocity over time, c/t, times two
geometric means with ranges at right angles to each other, as signified by
velocity, u, having the imaginary coefficient, i, in the second factor.
In terms of my unorthodox way of thinking, the Minkowski factor, g = (1 -
u²/c²)^1/2, is not so much a correction factor or "shrinking factor" but a
geometric mean or average over a range from limits of (1 - u/c) to (1 + u/c).
Similarly, its imaginary version, is a geometric mean over a perpendicular
range with limits from (1 - iu/c) to (1 + iu/c), where i, the square root of
minus one, serves as an operator for moving a value thru ninety degrees (just
as a sign of minus one, which equals i², familiarly moves a value thru a
further ninety degrees, that is in reverse, or negative, direction of one
hundred and eighty degrees).
This represents vector acceleration in terms of complex numbers. In
mathematics, complex numbers and vectors are recognised as two ways of
representing the same thing.
Here then are now two ranges. Not only from (c-u) to (c+u) but another range
from (c-iu) to (c+iu). The only difference between u and iu is that the
imaginary version of u is at right angles to the so-called real version of u.
The imaginary coefficient signifies the operation of turning value, u, thru
ninety degrees.
If light speed, c, was the value at the pivot of a compass, then the
velocity u, by its four signs is at the four points of a compass, north, iu;
east, +u; south, -iu; and west, -u.
The light speed is at the center of these four directions of variation in
speed, u. And of course these variations of velocity, about the light speed,
are on a plane.
(All the possible positions on a plane are mapped by complex numbers, which
are a co-ordination of a real number plus an imaginary number. The mappings of
the four points of the compass are also combined numbers but their partner
ordinate numbers happen to be zero, so they are left out. The origin of a
graph, with which the four compass points are in line, is usually set at zero.
Typically the value of the origin is adjusted to zero for convenience, just as
light speed itself is adjusted, usually to one or unity for convenience.
These conventions are meant to simplify, tho they take a little explaining.)
Previously, the geometric mean was explained as an average or representative
value of a range of values along a line or single dimension. But in this case,
the geometric mean can be conceived as a (vector) average of two lines of
ranges, at right angles to each other, and hence representative of two
dimensions or a range about a plane.
Hence, the geometric mean vector
In other words, this compass-like vector of velocities varying, at a given
level, in all directions about light speed, is a two-dimensional complex
velocity. Not to forget that it is divided by time, t, which makes for a
complex acceleration, A. That is to say, the equation for vector acceleration,
A may be considered as a complex geometric mean acceleration.
Moreover, motion in a circle, say, of a spinning compass, translates into
wave motion, where the distance from north to south is the amplitude of a wave
from crest to trof. But when the variable is complex for mapping a plane,
rather than a line, the wave wouldnt be like the up and down motion of a piece
of string attached to a wall at one end and given a fillip by someone holding
the other end. It wouldnt be a simple vibration up and down in one vertical
dimension. Rather it would be a planar vibration.
(A cork-screw is a possible evolution of a planar vibration.)
However many dimensions these wave motions are measured in, they give a
picture of the Interval as being of observers whose local measures differ from
one another in terms of their differing local velocities, as differing
amplitudes varying about an equilibrium of light speed.
Tho, taking their (geometric mean) average ensures no (massive) object quite
reaches light speed.
From the mathematical form of the Interval, locally measured observer
velocities look like tachyonic crests and tardyonic trofs statisticly ranging
about that equilibrium we know as the constant speed of light.
The concept of mass is the province of dynamics and this discussion has been
in terms only of kinematics, whose equivalent term is time. In terms of time,
rather than mass, no acceleration ever slows down time sufficiently to reach
timeless light speed.
It has been said that special relativity is a new theory of absolutes, like
classical physics but replacing an absolute speed and time and velocity (of the
ether) with an absolute speed of light. But the above analysis suggests that
this is not unconditionally the case. The geometric mean of speeds relative to
light speed is something of an equilibrium speed whose amplitude varies as the
speeds of local observers.
This interpretation of large-scale physics is supported by quantum
electro-dynamics (QED) of the extremely small distances in which light varies
in speed above and below the normal speed it averages out at.
The Michelson-Morley experiment with its split perpendicular light beam
reflections might be thought of as a single perpendicular oscillation. If these
reflections were repeated, then the experiment would be reminiscent of the fact
that light itself is a perpendicular electro-magnetic wave oscillation.
A typical wave equation is of two second order derivatives. Relatively
speaking, this is what are the two accelerations for longitudinal reflection
and cross-ways or transverse reflection, given above. Usually the waviness
(down the crests and up the trofs) is dependent on time and distance variables.
(As well as distance having a wavelength, time has a wavelength called the
period.)
In the above example, the independent variable for distance is the angle Q.
Hence differentiating, from v = c cos Q. Then dv/dQ = -c sin Q = -cu/c = -u.
Assuming some unknown coefficient (given by question mark, ?) is needed to
equate dv/dt to dv/dQ.
Then: ?dv/dt = dv/dQ.
Or:
-?v/t = -u.
Therefore: ? = x/v. But, from above, the angular velocity, w = v/x.
And (without using the curly letter-d customary for signifying partial
differentiation, involving more than one independent variable):
(x/v)dv/dt = dv/dQ.
Or:
dv/dt = w.dv/dQ.
Or expressed as a second order equation of the Interval distance over a
change in a change of time, t, and change in a change of the angle Q:
d²I/dt² = w.d²I/dQ².
In the equation of (geometric mean) average velocity, v, which equals
c(1-u²/c²)^1/2, this velocity changes, meaning there is acceleration.
Therefore, velocity, u, must change (light speed, c, being constant). In the
Michelson-Morley experiment, velocity u, is the earth velocity, which is
practically constant. So, another situation would have to be imagined of an
earth or carrier that changes velocity.
In the Minkowski Interval, velocity u, is the local velocity that any given
observer measures in their frame of reference. All observers agree on the
Interval, the combined space and time measure of a given event, tho their
space, time and velocity measures differ from their different view-points.
Conventionally, in Special Relativity, the Minkowski Interval only applies
to constant velocity or motion in a straight line. There wouldnt be much point
in differentiating observers local velocities, u, because this is liable to
lead to non-relativistic derivatives. Instead, the relativistic velocity, v,
must be differentiated and this should produce the sort of relativistic
acceleration differentiation shown above.
The Interval itself remains constant, thru that differentiation, as the
co-ordinating measure that allows different observational reference frames to
agree on their measure of an event.
(This is possible from differentiating v = I/t, where I is constant, to obtain
an acceleration in terms of: dv/dt.)
But a further change is allowed. Not only may observers measure different
local velocities but the local velocity of each observer may now itself change
(which goes beyond the popularisations of special relativity, with which I am
familiar).
I admit unanswered questions, such as that acceleration implies an Einstein
equivalence with gravity and curvature of space and its Riemann geometry. While
the Minkowski Interval is just an extension of Euclid geometry of flat
space.
(A BBC Horizon program of 3 September 2012 confirmed that astronomy measures
the universe to be flat space. They triangulated Earth onto the opposite edges
of a random heat splodge in the microwave radiation background left over from
shortly after the Big Bang. And the triangle added up to 180 degrees.)
To top
This last section is just an after-thought, which Ive tagged-on for good (or
ill) measure. Mainly in ignorance, it suggests but does not show or
demonstrate. My apologies, as ever.
Einstein's Principle of Equivalence of acceleration to gravity is the basis
of the General Theory of Relativity. It would seem reasonable to suppose that
in so far as acceleration is pre-figured in Special Relativity, so should be
the Equivalence Principle.
Conventional differentiation belongs to a mathematical field called linear
analysis. For instance, it is not suitable for non-linear analysis such as
involved in Chaos theory.
And Einstein's field equations of general relativity are non-linear, which also
makes them difficult to solve.
From what I could gather, conventional differential calculus, as linear
analysis, at least, needed adapting for the curvilinear geometry that replaced
the linear geometry of the Minkowski Interval, essentially a four-dimensional
extension, to a so-called space-time, of Euclid's straight-line geometry, in
three-dimensional space, and suitable for describing uniform motion in a
straight line.
Apart from this geometric generalisation from Euclid and Minkowski geometry,
as a geometry of zero curvature, Einstein broke radically with special
relativity in deriving general relativity.
The basis of this radical departure is Einsteins famous thought experiment,
of the accelerating lift in outer space, produces the effect of light bending
at fantastic accelerations, as it crosses from one window to another, that
would appear to an observer inside the lift, as he also undergoes a
gravitational-type fall. Hence the equivalence principle of acceleration to
gravity. And the need for a geometry of curvature to describe the bending and
the replacement of a supposed force of gravity with the notion of space and
time curving.
Having admitted those limitations to conventional differentiation
generalising special to general relativity, still, an element of the
acceleration frame of reference might be pre-figured in special relativity. And
it may be that so is the principle of equivalence. I am just supposing!
Einsteins equivalence principle does not actually say that acceleration
equals gravity. Acceleration belongs to kinematics, the study of motion. But
gravity or gravitational mass belongs to the further field called dynamics.
The version of the Interval, given above, is the kinematic version. But it
also has a dynamic version. This is completely analgous to the kinematic
version, except that time is replaced by mass. Instead of time multiplied by
velocity to give a distance variable, velocity is multiplied by mass to give
momentum, p. And instead of light speed multiplied by time, light speed is
multiplied by mass, and usually expressed in terms of energy, E, using the
famous equation of Poincare and Einstein, of E = mc².
Thus there is a sense in which there is an equivalence between the kinematic
and dynamic Intervals. If the time and mass variables happened to be the same,
they would in fact be equal. At any rate, time and mass are in proportion in
equating the kinematic and dynamic Intervals.
So, besides differentiating a velocity by time for an acceleration, it would
be equally possible to differentiate that velocity in terms of mass, which
varies proportionately to time. Considering mass as gravitational mass, then
here may be an equivalence between gravity and acceleration, the basis of
general relativity, derived from special relativity.
Richard Lung.
2011 & (briefly uploaded before revision) 28 july 2012;
30 december 2012.
To top
To home page